Токоприемник Л-1У1-01
Токоприемник предназначен для передачи через скользящий контакт электрической энергии от контактного провода к электрическому оборудованию электровоза и имеет следующие технические данные: ставляют собой закрепленный иа основании шарнирный подрессоренный четы-рехзвенник, несущий в верхней части поворотный кронштейн. На кронштейнах закреплен полоз 6 штампосварной конструкции с тремя рядами съемных угольных вставок. По концам полоз имеет отогнутые вниз рога для исключения по-
Номинальное напряжение переменного тока, кВ 25
Номинальный длительный ток, А 900
Номинальное давление, МПа 0,5
Максимальная скорость движения электровоза, км/ч 140
Диапазон рабочей высоты, мм 400-1900
Максимальная высота подъема, мм, не менее 2100
Статическое нажатие на контактный провод в диапазоне рабочей высоты, Н: ' активное (при подъеме) не менее 60 пассивное (при опускании) не более 90 Разность статических нажатий при подъеме и опускании полоза на одной и той же высоте во всем диапазоне рабочей высоты, Н, -не более 20 Разность между наибольшим и наименьшим нажатиями при одностороннем (вверх или вниз) движении в диапазоне рабочей высоты, Н, не более 10 Масса, кг, не более 270
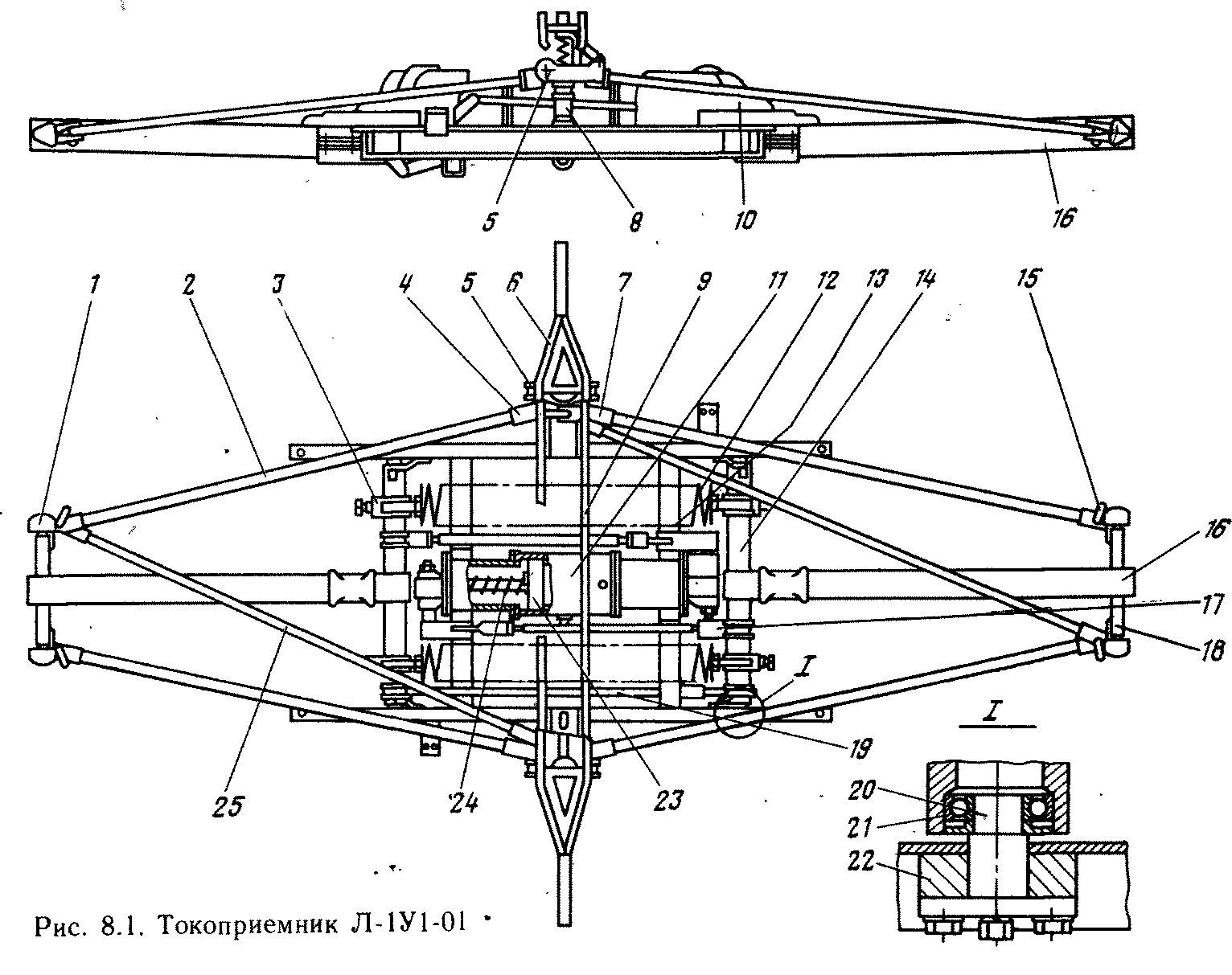
Токоприемник (рис. 8.1) состоит из основания, подвижной системы в виде шарнирно сочлененных подвижных рам, контактной системы, имеющей каретки и полоз с угольными вставками, а также механизма подъема и опускания.
Основание 13 выполнено в виде прямоугольной сварной рамы с двумя несущими и двумя поперечными скрепляющими швеллерами. Нижние рамы подвижной системы состоят из поворотных валов 14 и труб: несущих съемных 16 и поперечных 18 для крепления верхних рам. Валы 14 установлены в основании 13 на полуосях 20. Один конец каждой полуоси жестко закреплен в несущих швеллерах посредством сухарей 22, а второй - через шарикоподшипники 21, размещенные в торцовых выточках валов, и служит опорой последних.
Верхние рамы имеют связанные диагональной трубой 25 две продольные трубы 2, на концах которых размещены шарниры 1, 4 и 7. Они служат для установки подшипников и сочленения рам между собой в верхней части, а также с нижними рамами на трубе 18. На шарнирах 4 и 7 установлены распорки 9 для увеличения жесткости верхних рам и установки кареток 5. Последние предпадания контактного провода под полоз на воздушных стрелках.
Пневматический привод 11 установлен на основании 13 и состоит из правого и левого пневмоцилиндров с поршнями 23, уплотненными резиновыми манжетами. Каждый поршень воздействует на опускающую пружину 24, встроенную в его цилиндр, и через тяги - на шарнирные рычаги 17 валов нижних рам. Подъемные пружины 12 закреплены шар: нирно в кронштейнах 3, установленных на валах 14 нижних рам с возможностью регулирования положения центра оси подвески пружин.
Синхронизирующая тяга 19 шарнирно соединяет валы нижних рам и обеспечивает одновременность их работы. Для смягчения ударов подвижной системы прн опускании на основании установлены, два амортизатора 8 с резиновыми буферами на подрессорных штоках. Механизм подъема и опускания накрыт стеклопластовым кожухом 10. Все шарнирные соединения электрически зашун-тированы медными гибкими шунтами 15.
При подаче в пневматический привод сжатый воздух сжимает опускающие пружины, исключая их действие на валы нижних рам. Подъемные пружины под-
иимают подвижную систему токоприемника, а при касании полозом контактного провода создают необходимое контактное нажатие (рис. 8.2).
Наличие кареток обеспечивает работу токоприемника без отрывов полоза контактного провода при небольших изменениях высоты последнего, поскольку от усилия контактного нажатия пружины

кареток просаживаются только на 20- 40 % хода.
Для опускания токоприемника сжатый воздух из пневмопривода с помощью вентиля токоприемника выпускают в атмосферу. Усилие опускающих пружин через тяги, шарнирно-рычажиую связь и валы преодолевает действие подъемных пружин, обеспечивая определенное избыточное опускающее усилие. Это приводит к о'пусканию подвижной системы до посадки на амортизаторы.
⇐ | Блок питания БП-6 | | Электровоз ВЛ85 | | Выключатель ВОВ-25А-10/400УХЛ1 | ⇒